Vektor dimensi dua adalah vektor yang mempunyai dua unsur yaitu unsur vertikal (sumbu Y) dan horizontal (sumbu X). Vektor pada bidang datar (dimensi dua) ditandai dengan sumbu X dan sumbu Y, yang saling berpotongan di titik pusat O (0, 0)
Daftar Isi
Vektor dimensi dua adalah vektor yang mempunyai dua unsur yaitu unsur vertikal (sumbu Y) dan horizontal (sumbu X). Vektor pada bidang datar (dimensi dua) ditandai dengan sumbu X dan sumbu Y, yang saling berpotongan di titik pusat O (0, 0). Secara analitis vektor dimensi dua dapat disajikan menurut unsur-unsurnya yaitu:
a=xy atau a=(x,y)atau kombinasi linear a=xi+yj
Dengan x adalah unsur mendatar. Apabila x>0 (positif) maka x mempunyai arah ke kanan dan apabila x<0 (negatif) x mempunyai arah ke kiri. Selanjutnya y adalah unsur vertikal. Apabila y>0 (positif) maka arahnya ke atas dan jika y<0 (negatif) arahnya ke bawah.
1. Komponen Vektor, Vektor Kolom, dan Vektor Baris
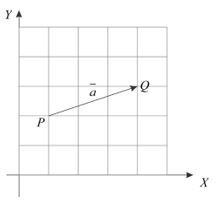
Perhatikan vektor pada gambar berikut
Secara umum vektor a pada gambar diatas dapat ditulis secara kolom sebagai berikut
PQ=a=(31)
selain dengan vektor kolom, vektor a juga dapat ditulis dengan vektor baris seperti berikut
PQ=a=(3,1)
(31) disebut Vektor kolom dan (3,1) disebut vektor baris. 3 dan 1 merupakan komponen dari Vektor a.
Vektor yang digambarkan pada bidang koordinat mempunyai komponen horisontal (gerakan ke kanan/kiri) dan komponen vertikal (gerakan ke atas/bawah). Oleh karena itu, vektor dapat disajikan secara kolom.
PQ=(Komponen horisontalkomponen vertikal)
2. Vektor Posisi
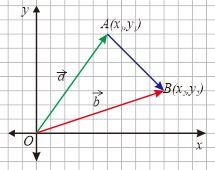
Vektor Posisi adalah vektor yang berpangkal di pusat koordinat O(0,0) dan berujung di suatu titik (x,y). Perhatikan sebarang titik A(x1,y1) dan titik B(x2,y2) pada koordinat Cartesius berikut.
Pada gambar di atas, vektor a mewakili ruas garis berarah dari titik pangkal O(0,0) ke titik A(x1,y1) atau vektor OA. Oleh karena itu, vektor a dapat dituliskan dalam bentuk vektor kolom OA=a=(x1y1) Adapun vektor b mewakili ruas garis berarah dari titik pangkal O(0,0) ke titik B(x2,y2) atau vektor OB. Vektor b dapat dituliskan sebagai OB=b=(x2y2)
Sekarang perhatikan vektor AB. Vektor AB kita dapatkan dengan cara menarik garis dari titik A ke titik B. Seperti yang sudah dipelajari sebelumnya, vektor AB dapat dinyatakan dalam bentuk penjumlahan vektor secara geometri yaitu AB=OB−OA sehingga
ABAB=OB−OA=b−a=(x2y2)−(x1y1)=(x2−x1y2−y1)
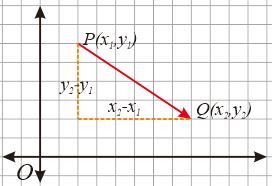
3. Modulus atau Besar Vektor
Modulus menyatakan panjang atau besar vektor. Karena panjang atau besar vektor selalu bernilai positif maka cara menulis modulus menggunakan tanda mutlak (∣∣).
Jika diketahui koordinat titik P(x,y) maka panjang vektor posisi OP=(xy) dirumuskan dengan dalil pythagoras atau sebagai berikut ∣OP∣=x2+y2.
Contoh 1 Diketahui Vektor OQ=q=(34). Tentukan Panjang Vektor q
Alternatif penyelesaian ∣q∣=32+42∣q∣=25∣q∣=5
Jadi, Panjang Vektor q adalah 5 satuan
4. Vektor satuan
Pada pembahasan sebelumnya, vektor satuan dari vektor a dirumuskan:
ea=∣a∣a atau a=∣a∣a
Dalam Vektor kolom, jika a=(xy), maka
a=x2+y21.(xy)
5. Sifat Operasi Vektor kolom
a. Penjumlahan Vektor
Secara analisis, Penjumlahan dua vektor dapat dikerjakan sebagai berikut a+b=(x1y1)+(x2y2)=(x1+x2y1+y2)
Apabila kedua vektor diketahui mengapit sudut tertentu, maka dapat digunakan perhitungan dengan memakai rumus aturan cosinus seperti pada trigonometri.
Apabila sudut antara a dan b adalah θ, maka
∣a+b∣2∣a+b∣=∣a∣+∣b∣+2∣a∣∣b∣cosθ=∣a∣+∣b∣+2∣a∣∣b∣cosθ
Jika vektor disajikan dalam bentuk komponen (dalam bidang kartesius) maka penjumlahan dapat dilakukan dengan menjumlahkan komponennya.
Misalnya: a=(xAyA) dan
b = (xByB) maka
a+b=(xA+xByA+yB)
Contoh 2 Diketahui vektor a=(2−3) dan vektor b=(−43). Tentukan penjumlahan vektor dari a+b! Alternatif Penyelesaian a+b = (2+(−4)−3+3)=(−20)
Contoh 3 Diketahui panjang vektor |a| = 2 dan panjang vektor |b| = 4, sudut antara vektor a dan b adalah 60∘, maka :
Secara analitis, jika diketahui Vektor
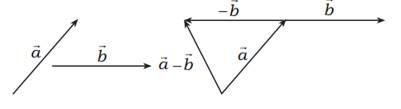
a=(a1a2) dan b=(b1b2) maka pengurangan dua Vektor dapat dirumuskan a−b=(a1−b1a2−b2)Contoh 4
Diketahui vektor p=(6−3) dan vektor q=(−43). Tentukan vektor dari p−q! Alternatif Penyelesaian p−q = (6−(−4)−3−3)=(10−6)
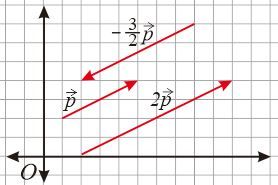
c. Perkalian Skalar dengan Vektor
Perkalian skalar dengan vektor akan menghasilkan vektor dengan arah yang sama. Vektor v sejajar dengan vektor u, ditulis v//u jika:
v=k.u, dengan k skalar, k∈R
Jika k>0, maka v searah u
Jika k<0, maka v berlawanan u
Secara analitis, jika diketahui Vektor a=(a1a2)maka k.a=(k.a1k.a2), dengan k sebuah konstanta.
Contoh 5 Diketahui a=(−23) dan b=(4−2) tentukanlah 3b–21a!
Alternatif Penyelesaian 3b–21a=3(−23)−21(4−2)=(3.(−2)3(3))−(21(4)21(−2))=(−69)−(2−1)=(−6−29−(−1))=(−810)
**Contoh 6** Tentukan apakah titik-titik P(1, –2), Q(2, 1), dan R(4, 7) kolinear (segaris). **Alternatif Penyelesaian:** Titik P, Q dan R dikatakan kolinear (segaris) jika titik P, Q dan R terletak pada garis yang sama. Titik P, Q dan R akan terletak pada garis yang sama jika dan hanya jika vektor-vektor yang mewakili ruas garis berarah dari titik-titik P, Q dan R memiliki pangkal yang sama dan sejajar. Vektor PQ dan PR memiliki titik pangkal yang sama. Komponen vektor PQ=q−p=(21)−(1−2)=(13) Komponen vektor PR=r−p=(47)−(1−2)=(39)
Dua vektor segaris jika ada bilangan k yang memenuhi PR=k.PQ dan kedua vektor berpangkal yang sama.
PRPR=(39)=3(13)=3PQ
Karena PR=3PQ berarti vektor PQ sejajar vektor PR dan sama-sama berpangkal di titik P. Jadi, dapat disimpulkan bahwa titik P, Q dan R merupakan titik-titik yang kolinear (segaris).
d. Kesamaan dua Vektor
Secara analitis, dua Vektor a=(a1a2) dan b=(b1b2) dikatakan sama jika dan hanya jika a1=b1 dan a2=b2
4. Basis Normal Standar
Definisi basis
Jika v1,v2,v3,...,vn adalah Vektor-vektor dalam ruang V. Maka untuk setiap Vektor v∈V, Vektor v dapat dinyatakan sebagai **kombinasi linear** dalam v1,v2,v3,...,vn yaitu: v=k1v1+k2v2+k3v3+...+knvn dengan k1,k2,k3,...,kn tunggal.
Jika masing-masing vektor tersebut panjangnya 1 satuan dan saling tegak lurus , maka v1,v2,v3,…,vn itu disebut basis normal standar dalam ruang V
Berdasarkan definisi tersebut maka kita dapat menyimpulkan bahwa vektor-vektor:
i=(10) dan j=(01) adalah basis normal standar dalam ruang vektor R2 dengan i dan j masing-masing sejajar dengan sumbu X dan Y
i=100,j=010 dan k=001adalah basis normal standar dalam ruang vektor R3 dengan i, j dan k sejajar dengan sumbu X, Y, dan Z.
Dengan demikian, jika P sebuah titik (x,y) dan O(0,0), maka Vektor posisi OP dapat ditulis sebagai kombinasi dari dua Vektor basis
OP=p=(xy)=x(10)+y(01)=xi+yj
Contoh 7 Diketahui segitiga OAB dengan titik sudut: O(0, 0), A(3, 1) dan B(6, 5). a merupakan vektor posisi dari titik 𝐴 dan b vektor posisi dari titik 𝐵.
Nyatakan vektor a, b dan AB dalam bentuk vektor basis. Alternatif penyelesaian: a=x1i+y1j=3i+j b=x1i+y1j=6i+5j AB=b−a=(6i+5j)−(3i+j)=3i+4j
Latihan 3
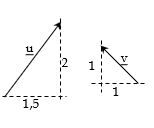
Perhatikan gambar vektor di samping :
Gambarlah vektor :
3.u
−2.v
u+v
2.u–v
Jika diketahui u=(23)
dan v=(−41) tentukanlah :
u
−3.v
3.u+2.v
2.v–u
Diketahui vektor a=(2−1) dan b=2.a , tentukanlah vektor c=a+b
Diketahui vektor a=(−24), b=(xy) dan c = (35). Tentukan x dan y jika c=a+b
Jika vektor m=(−84) dan n=(10−6) tentukanlah secara aljabar vektor dari :
21m–21n
41m+21n
Diketahui a=(−4−2) dan b=(14) tentukanlah 3b–21a!
Jika a=(25) dan b=(3−7) tentukanlah 2a–21b!
Jika p=(5−3) dan q=(4−2) tentukanlah 21b–21q!
Jika diketahui p=(4−6) dan q=(xy) tentukanlah x dan y jika p+q=(−2−3)!
Jika a=(a1a2) dan b=(−92) tentukanlah a1 dan a2 jika a–b=(47)!
 Secara umum vektor pada gambar diatas dapat ditulis secara kolom sebagai berikut
selain dengan vektor kolom, vektor juga dapat ditulis dengan vektor baris seperti berikut
Secara umum vektor pada gambar diatas dapat ditulis secara kolom sebagai berikut
selain dengan vektor kolom, vektor juga dapat ditulis dengan vektor baris seperti berikut
 Pada gambar di atas, vektor mewakili ruas garis berarah dari titik pangkal ke titik atau vektor . Oleh karena itu, vektor dapat dituliskan dalam bentuk vektor kolom
Pada gambar di atas, vektor mewakili ruas garis berarah dari titik pangkal ke titik atau vektor . Oleh karena itu, vektor dapat dituliskan dalam bentuk vektor kolom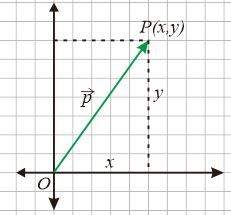 Jika diketahui koordinat titik maka panjang vektor posisi dirumuskan dengan dalil pythagoras atau sebagai berikut .
Jika diketahui koordinat titik maka panjang vektor posisi dirumuskan dengan dalil pythagoras atau sebagai berikut .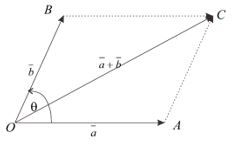 Apabila sudut antara dan adalah , maka
Apabila sudut antara dan adalah , maka
 Contoh 4
Diketahui vektor dan vektor . Tentukan vektor dari !
Contoh 4
Diketahui vektor dan vektor . Tentukan vektor dari !
 Gambarlah vektor :
Gambarlah vektor :